資料の紹介
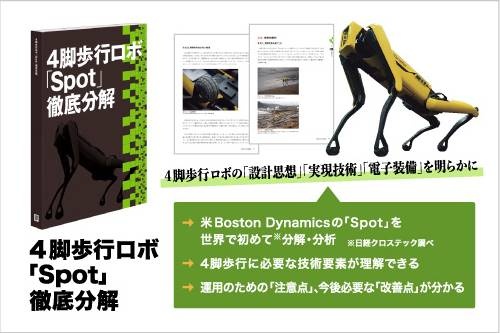
ロボット利活用の空白地帯ともいうべき「4脚歩行」領域への注目が急速に高まっている。米Boston Dynamics(ボストンダイナミクス)の4脚歩行ロボット「Spot」は、4脚を使い犬のように歩くことで、建設資材が散乱する工事現場、階段、山道、砂場など、人が歩ける場所ならほぼどこへでも行くことができる。
Spotを一言で表現するなら、ハイエンドなパソコンと、4脚歩行の駆動機構が融合した製品だ。複雑な、この4脚歩行をいったいどのような機構で実現しているのか。どのようなソフトウエア開発基盤となっているのか。Spotを入手し、分解・分析することで4脚歩行の仕組みを明らかにしたのが、本レポート「4脚歩行ロボ『Spot』徹底分解」だ。
どのようなセンサー、モーター、減速機が必要なのか。軽量化や剛性はどのように確保しているのか。200点を超える、写真や図表を使ってビジュアルに表現し、様々な角度から分解物を理解できる構成になっている。
特筆すべきは、独自の実地試験と分解調査を行い、Spotの弱点を検証した点だ。走行テストを実施し、滑りやすい斜面、足元の障害物への対応、転倒からの復帰などを検証。その結果分かった2つの大きな課題、「防水・防塵(ぼうじん)への弱さ」と 「滑りに対する耐性のなさ」について解説している。さらに、水没直後の動作不能になったSpot各部を分解し、水の浸入状況を細部写真で検証。屋外、雨の中や沼地などの劣悪環境で走行可能にするための課題を明らかにした。ロボットの開発はもちろん、サプライチェーンへの参入を目指す方にとっても、貴重な一冊である。
-----「4脚歩行ロボ『Spot』徹底分解」の内容
▼「Spot」実機を分解・分析
約820万円の製品をバラバラにし、その構造を徹底分析。
●どうやって操作するのか
●カスタマイズは可能なのか
●どう制御されているのか
●どう動作するのか
●どのような部品で、実現されているのか
メインコンピューター、脚部のドライブ機構、冷却機構、カメラ、電池パック、コントローラーなどについて、200点を超える画像や図表を掲載。機械工学の専門家の視点で、分かりやすく解説。
▼4脚歩行に必要な技術要素
分解・分析で見えてきた4脚歩行のために必要な4要素について、設計思想とともに各所に施された工夫を解説。
●全体構造…軽量、強固かつ柔軟な素材と構造を採用
●歩行機構…コンパクトなモーター機構や、地面の凹凸に素早く反応するための工夫
●制御…必要最小限でありながら効果的にセンサーを配置。随所に高精度・高レスポンスで動ける工夫
●冷却…高い計算能力を持つコンピューターと高速で動くモーターを冷やすための工夫
▼実運用のための注意点、今後必要な改善点
平地、斜面、積雪、水路など、様々な条件を想定した走行テストを実施。実地試験の結果見えてきた課題と改善点について解説。さらに、Spotを水没させてみて分かった防水対策の甘さについても徹底解剖。
(※下部より全目次と抜粋版をダウンロードできます)