資料の紹介
ロボット市場はいま、急速に拡大している。設計や電子機器のコストが下がるにつれて、ロボットは身近な機械となり、人と一緒に工場などで作業を行う協働ロボットも増えてきた。物流倉庫で商品を運ぶ無人搬送車や、レストランで料理を運ぶ配膳ロボットも広く活用されている。
ロボットの活躍の場が広がるにつれて、モーター制御の精度や電力効率、コストに対する要求は高まるばかりだ。高い精度は、モーションコントローラーからのコマンドを確実にモーターへ送り、モーター位置の追跡や修正を正確に行うことで実現できる。これに加えて電力効率やコストの要求に応えるためには、様々な要素技術が必要となり、幅広いエンジニアリング能力が求められる。
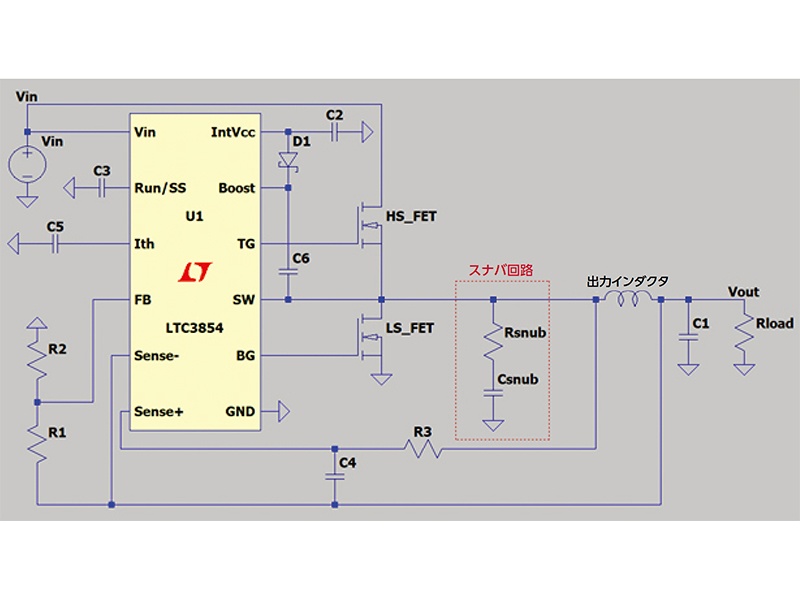
本資料では、効率的で正確なモーター制御の実現に向けたリファレンスモデルについて解説する。肝となるコントローラー、電力供給、フィードバックループの3要素を1つに集約している。コントローラー、電源、エンコーダーなどがモジュール化されていて簡単に交換できるようになっており、様々なモーター制御の方法を迅速に評価できるという。